Below is a useful chart comparing the Arduino UNO, Raspberry Pi, and BeagleBone.
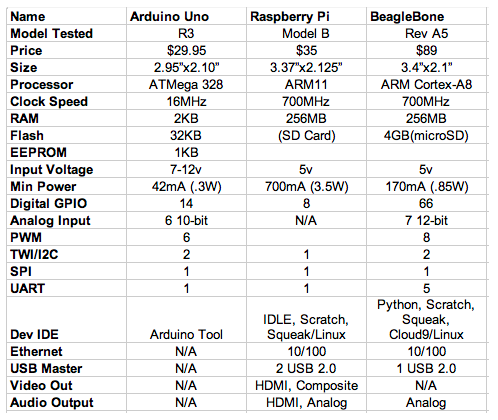 There are a few other reasons for choosing the Pi. The first reason is it's cost relative to its computing power and capabilities. We believe that this board is able to offer many things others do while also giving us the cheapest product. The second reason why we chose the Raspberry Pi is, as we explained above, because of its extensive online doxumentation. There are hundreds of websites, blogs, and posts dedicated to the Raspberry Pi. We knew that the magnitude of data on the Pi would help us greatly as none of us have much prior experience configuring a computer.
There are a few other reasons for choosing the Pi. The first reason is it's cost relative to its computing power and capabilities. We believe that this board is able to offer many things others do while also giving us the cheapest product. The second reason why we chose the Raspberry Pi is, as we explained above, because of its extensive online doxumentation. There are hundreds of websites, blogs, and posts dedicated to the Raspberry Pi. We knew that the magnitude of data on the Pi would help us greatly as none of us have much prior experience configuring a computer.
There are a few other reasons for choosing the Pi. The first reason is it's cost relative to its computing power and capabilities. We believe that this board is able to offer many things others do while also giving us the cheapest product. The second reason why we chose the Raspberry Pi is, as we explained above, because of its extensive online doxumentation. There are hundreds of websites, blogs, and posts dedicated to the Raspberry Pi. We knew that the magnitude of data on the Pi would help us greatly as none of us have much prior experience configuring a computer.
We would also recommend the Raspberry Pi to anybody who is looking to have a good time learning the tricks of the Raspberry Pi, but also to anybody who wants to create an advanced robotics system and is looking for the right computer.
 |
| Raspberry Pi Model B |
No comments:
Post a Comment